
Mankind’s expansion into Earth’s orbit and beyond yields an ever-increasing diversity in spacecraft mission profiles with varied levels of operational complexity. To meet requirements, there has been an explosive growth in space technology that continues to elicit transformative advances in inexpensive and reusable spacecraft frameworks. This maturation forms a basis for spacecraft capabilities of the future, which includes on-orbit servicing, assembly, & manufacturing; multi-agent systems & formation flying; and spacecraft capable of autonomous path-planning, obstacle avoidance, & decision-making.
Towards the development of these critical architectures, the LASR Lab focuses on several research areas: astrodynamics; autonomous systems, robotics, and emulation platforms; computer vision; estimation & sensing; and tensegrity systems.
Astrodynamics






The LASR Lab investigates trajectory analysis, orbit design, and control schemes for spacecraft operating in both Earth’s domain and in chaotic, multi-body regimes. Specific problems of interest include:
- Thrust event and station keeping analysis using input-output subspace metrics
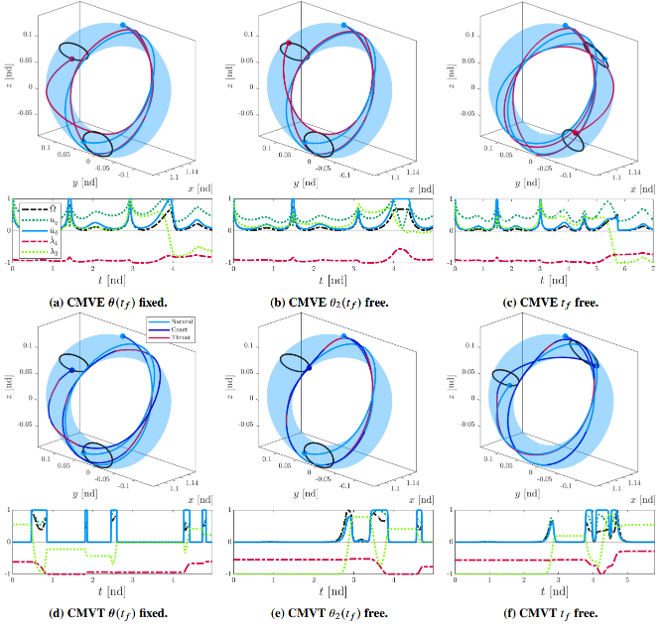
- Low-thurst rephasing on quasi-periodic invariant tori (QPIT) in multi-body environments
- Analysis of gravity-gradient torque disturbances in the Near-Rectilinear Halo Orbit (NRHO) regime using a spherical harmonic gravity model
- Investigation of the use of two-dimensional resonant tori in the elliptical restricted three body problem (ER3BP) on which to place space-based sensors for surveillance of the L1/Moon/L2 subdomain of cislunar space
- Development of a universal approach (valid across all conics) to solving Lambert’s problem
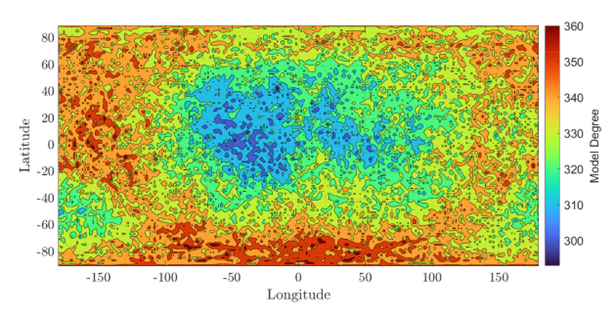
- Model fidelity selection schemes for implementing the spherical harmonic gravity model
Relevant literature:
- Nelson, Q., and Majji, M., “The Finite-Horizon Time-Varying Vinnicombe Gap Metric for Robust Cislunar Station-Keeping,” 2025 AAS/AIAA Astrodynamics Specialist Conference, 2025.
- Nelson, Q., and Majji, M., “State-Space Methods for Calculating the Discrete-Time Vinnicombe Gap Metric,” 2025 AAS/AIAA Space Flight Mechanics Meeting, 2025.
- Down, I. M., Majji, M., and Howell, K. C., “On-Manifold Low-Thrust Rephasing of Quasi-Periodic Orbits,” arXiv preprint arXiv:2507.07940, 2025.
- Hernandez, N., Down, I. M., McElreath, J., and Majji, M., “Analysis of Gravity Gradient Torque Disturbances in the NRHO Regime,” 2025.
- Down, I., DeMars, K., and Majji, M., “Cislunar Space Domain Awareness Leveraging Resonant Tori Structures,” AAS/AIAA Astrodynamics Specialist Conference, 2024.
- McElreath, J., Down, I. M., and Majji, M., “A universal approach for solving the multi-revolution Lambert’s problem,” Celestial Mechanics and Dynamical Astronomy, Vol. 137, No. 4, 2025, p. 22.
- McElreath, J., and Majji, M., “Selecting Spherical Harmonic Gravity Model Truncation Degree with Regards to Model Uncertainty,” The Journal of the Astronautical Sciences, Vol. 72, 2025. https://doi.org/10.1007/s40295-025-00533-3.
Autonomous Systems for RPOD






Spacecraft autonomy is foundational to sustained, complex in-space operations and uninterrupted delivery of space-based services. It is especially critical for missions that require rendezvous, proximity operations, and docking (RPOD). The RPOD process involves multiple steps, some of which may require inspection, use of a manipulator, or coordinating movements between spacecraft. The LASR Lab investigates multiple research problems towards the development of more efficient, adaptive, and safe RPOD operations, including:
- Use of a Reinforcement Learning (RL) controller to incentivize acquisition of well-illuminated optical data during on-orbit spacecraft inspection
- Simulation of a manipulator using Simscape Multibody with validation on a mock satellite bus
- Development of control barrier functions to enable safe servicing agent relocation under pose uncertainty
- Development of a computationally efficient multi-agent model predictive control (MPC) formulation that uses an integral Chebyshev collocation method
- Minimum energy, low-thrust relative trajectory design for the deployment of spacecraft servicing modules onto an uncontrolled bundle of assembly components
- Use of tensegrity principles to design a formation-keeping controller for loitering spacecraft
- Use of probabilistic Markov models to transition between guidance modes to enable robust and efficient proximity operations
Relevant literature:
- van Wijk, D., Dunlap, K., Majji, M., and Hobbs, K. L., “Deep Reinforcement Learning for Autonomous Spacecraft Inspection Using Illumination,” arXiv preprint arXiv:2308.02743, 2023.
- Tidmore, H., Hilburn, E., van Wijk, D. E., and Majji, M., “Validation of In-Space Servicing, Assembly, and Manufacturing Missions Using Simscape Multibody,” 2025 22nd International Conference on Ubiquitous Robots (UR), IEEE, 2025, pp. 375–381.
- Parikh, D., van Wijk, D., and Majji, M., “Safe Multi-Agent Satellite Servicing with Control Barrier Functions,” arXiv preprint arXiv:2502.10480, 2025.
- Parikh, D., Ahrens, T. L., and Majji, M., “A Rapid Trajectory Optimization and Control Framework for Resource-Constrained Applications,” 2025 American Control Conference (ACC), IEEE, 2025, pp. 1687–1692.
- Down, I. M., van Wijk, D. E., Parikh, D., and Majji, M., “Autonomous Satellite Servicing Infrastructure for In-Space Assembly and Manufacturing,” Journal of Manufacturing Science and Engineering, Vol. 146, No. 12, 2024, p. 121008.
- Ingalls, B., Nelson, Q., Fry, M., Hussain, I., Majji, M., and Garcia Carrillo, L. R., “Hardware Demonstration of Tensegrity-Based Multi-Agent Formation Control,” 2026 AAS/AIAA Guidance, Navigation, and Control Conference, 2026.
- Parikh, D., Khowaja, A. H., and Majji, M., “Robust Proximity Operations Using Probabilistic Markov Models,” arXiv preprint arXiv:2409.19062, 2024.
Computer Vision



Mankind’s expansion into Earth’s orbit and to the Moon yields an ever-increasing diversity in spacecraft mission profiles with varied levels of operational complexity. To meet requirements, there has been an explosive growth in space technology that continues to elicit transformative advances in inexpensive and reusable spacecraft frameworks. This concept forms a basis for spacecraft capabilities of the future, which includes on-orbit servicing, assembly, & manufacturing; multi-agent systems & formation flying; and spacecraft capable of autonomous path-planning, obstacle avoidance, & decision-making.
Towards the development of these critical architectures, this group focuses on several research areas: astrodynamics; computer vision; estimation & sensing; autonomous systems, robotics, and emulation platforms; and tensegrity systems.
Emulation Platforms and Robotics
The LASR Lab has made significant contributions in the areas of dynamics, control and simulation of mobile robotic systems for motion emulation. The laboratory is home to a variety of robotic platforms that are used for hardware-in-the-loop validation, satellite emulation, hosting estimation and filtering algorithms, and more.
CHOMER



The Canfield Holonomic Omni-directional Motion Emulation Robot (CHOMER) was designed to leverage modular and iterative design techniques in order to emulate complex and expensive dynamics operations. The system was designed to provide a robust array of capabilities while keeping costs down. Further, its compact form factor is ideal for in-lab testing operations. The combination of the base transport vehicle and the canfield joint enables 6 degree-of-freedom (DOF) motion. During experimentation, CHOMER can connect to mock satellites or tensegrity structures to emulate in-space events. The system provides students and partners with the opportunity to apply theoretical work designed for space systems in the physical world to address real-world unpredictability. The lab’s work with CHOMER ranges from continued mechanical design, kinematic and control analysis, and spacecraft system verification & validation. For example,
- Spacecraft proximity operations and rendezvous emulation
- Inertial state estimation using an Unscented Kalman Filter and Multiplicative Extended Kalman Filter
- Control system analysis and validation
Relevant literature:
- Tidmore, H., Ingalls, B., Khowaja, A. H., and Majji, M., “6-DOF Motion Emulation Platform for Low Overhead Applications: Design and Verification,” AAS/AIAA Guidance, Navigation, and Control Conference, 2025.
- Tidmore, H., “Optimization and Robotics for Emulation of Advanced Spacecraft GN&C Concepts,” Master’s thesis, Texas A&M University, 2025.
TPODS



The Transforming Proximity Operations and Docking System (TPODS) is a portable, planar holonomic motion testbed developed to emulate CubeSat proximity operations and multi-agent control environments. The system is designed to be highly modular, utilizing a combination of 3D printed and off-the-shelf components to enable rapid integration of various peripheral sensors, depending on the experimental use-case. The design of the TPODS units was driven by the need for emulation devices that fit the 1U size standard. Sensor suites used in prior experiments utilize components such as inertial measurement units (IMU), ultra wide-band radar (UWB), monocular cameras, and ultrasonic proximity sensors. TPODS units also connect to the lab’s Vicon motion capture system to obtain real-time global position and relative pose estimates. The lab has utilized the TPODS for experiments such as:
- Hardware-in-the-loop validation of a tensegrity-based formation control scheme
- Pose estimation via sensor fusion
- Kalman filter and model prediction control (MPC) algorithm testing
Relevant literature:
- Parikh, D., Fry, M., and Majji, M., “Transforming Proximity Operations and Docking Systems : Modular Tabletop Testbed Design and Experiments,” 2026 AAS/AIAA Guidance, Navigation, and Control Conference, 2026.
- Parikh, D., Khowaja, A. H., Long, N., Down, I., McElreath, J., Bire, A., & Majji, M., “A scalable tabletop satellite automation testbed: Design and experiments,” arXiv preprint arXiv:2409.09633, 2024.
- Ingalls, B., Nelson, Q., Fry, M., Hussain, I., Majji, M., and Garcia Carrillo, L. R., “Hardware Demonstration of Tensegrity-Based Multi-Agent Formation Control,” 2026 AAS/AIAA Guidance, Navigation, and Control Conference, 2026.
Nathan Bot
The LASR Lab has made significant contributions in the areas of dynamics, control and simulation of mobile robotic systems for 6-DOF motion emulation. The laboratory is home to a variety of robotic platforms that are used for hardware-in-the-loop validation, emulation of satellite motion, and more.
MAVS

The Multi-purpose Aquatic Vessel for Subsea and surface operations (MAVS) system is an unmanned underwater vehicle (UUV) designed to enhance performance at the waterline. The main focus of MAVS’ development was on the creation of a sea-based counterpart of TPODS, capable of controlled surface operations, docking, and object movement. The final design, the MAVS MK II UUV, was developed through rapid prototyping, and its mechanical and electrical design features a compact, watertight body measuring 4″ x 4″ x 18″, equipped with WiFi, ultra-wideband, and eight thrusters, allowing for streamlined 6-DOF maneuverability. The system implemented a digitized canonical PID controller for fine adjustments and an SQR controller for multi-waypoint navigation.
Relevant literature:
- Gunlock, A., “Hybridized Control and Mechanical Solutions for Enhancing Surface Capabilities of an Unmanned Underwater Vehicle,” Master’s thesis, Texas A&M University, 2025.
HOMER



The Holonomic Omni-directional Motion Emulation Robot (HOMER) is a piece of legacy lab hardware and is the predecessor of the CHOMER system. The primary design goal for HOMER was to provide true 6 DOF motion emulation for spacecraft mock-ups. Compared to the popular air bearing and epoxy floor option for motion emulation, the design of HOMER relied on a novel architecture that exclusively used electric actuator.
Relevant literature:
- McElreath, J., Capps, D., Adams, D., & Majji, M., “Robotic Testbeds for Emulation of In-Space Assembly and Manufacturing of Advanced Structural Systems,” Journal of Manufacturing Science and Engineering, 147(7), 071004, 2025.
- Peck, C., Adams, D. W., McElreath, J., Verras, A., Hiemerl, J., Majji, M., Benedict, M., Junkins, J., “Autonomous Deployment of Payload Packages to Spinning Rocket Bodies: Approach, Apparatus, and Emulation Using Ground Robotics,” Advances in the Astronautical Sciences, 172, 2020.
Estimation and Sensing
Mankind’s expansion into Earth’s orbit and to the Moon yields an ever-increasing diversity in spacecraft mission profiles with varied levels of operational complexity. To meet requirements, there has been an explosive growth in space technology that continues to elicit transformative advances in inexpensive and reusable spacecraft frameworks. This concept forms a basis for spacecraft capabilities of the future, which includes on-orbit servicing, assembly, & manufacturing; multi-agent systems & formation flying; and spacecraft capable of autonomous path-planning, obstacle avoidance, & decision-making.
Towards the development of these critical architectures, this group focuses on several research areas: astrodynamics; computer vision; estimation & sensing; autonomous systems, robotics, and emulation platforms; and tensegrity systems.
Tensegrity










Tensegrity, a portmanteau of “tensile” and “integrity” coined by Buckminster Fuller, is a form of structural design that leverages optimization and symmetry by using only tensile and compressive members. A tensegrity structure, by definition, has only members that take either tension, often referred to as strings, or compression, often referred to as bars. Neither member should take bending moments, as a result of careful design. In this way, greater structures can be designed and optimized by choosing the properties of the individual members, without the difficulties of accounting for torsion. This leads to an accurate model well-suited for minimal mass optimization, energy absorption and vibration management, and shape control. It’s often included in studies of soft robotics, truss theory, finite element analysis, and origami. The LASR Lab has primarily focused on the manufacturing process, both manual and automated, but has begun expanding into tensegrity robotics and shape control. Projects of interest include:
- Investigation of fast and efficient machine-assisted methods of producing tensegrity prisms
- Development of a “knitting” robot, loaded with collapsed tensegrity prisms, that is capable of constructing an arbitrarily large truss in space
- Design of Deployable Double-Helix Tensegrity (DHT) structures, inspired by the Yoshimura pattern, for inflatable pressure vessels
- Design of a spatial, discrete Michell truss to support a cantilever load, capable of wrapping about its circular base when not in use
- Investigation of discrete approximations to toroidal continua for mobility of robotic vehicles on unstructured terrains
Relevant literature:
- McElreath, J., Capps, D., Adams, D., & Majji, M., “Robotic Testbeds for Emulation of In-Space Assembly and Manufacturing of Advanced Structural Systems,” Journal of Manufacturing Science and Engineering, 147(7), 071004, 2025.
- Capps, D., “Computational Simulation of Dynamical String Based Capturing Methods,” Masters Thesis, Texas A&M University, 2021.
- Peck, C., & Majji, M., “A mass-optimal spatial tensegrity structure to support a cantilever load,” Journal of Aerospace Engineering, 36(4), 04023019, 2023.
- Peterson, J., Peck, C., Majji, M., and Skelton, R. E., “Tensegrity Wheel Topology for Mobility of Planetary Rovers over Unstructured Terrains,” Earth and Space 2021 (pp. 1069-1078), 2021.