
Space Simulation and Motion Emulation
At the LASR Lab, we use robotics to emulate the space enviornment for hardware-in-the-loop testing. This requires high-precision motion throughout the experimental space. We like to think of the facility as a ‘dynamics and control wind tunnel’ for space systems.
HOMER
 Proximity Operations experiments at the LASR Lab are supported by the Holonomic Omni-directional Motion Emulation Robot, better known as HOMER. HOMER consists of a mobile, planar base accompanied by a micron-class Stewart platform and is capable of manipulating a 10 kg payload through 6-DoF. The base provides large, omni-directional, untethered motion while the Stewart platform superimposes out-of-plane motion and accounts for any inaccuracies in the base.
Proximity Operations experiments at the LASR Lab are supported by the Holonomic Omni-directional Motion Emulation Robot, better known as HOMER. HOMER consists of a mobile, planar base accompanied by a micron-class Stewart platform and is capable of manipulating a 10 kg payload through 6-DoF. The base provides large, omni-directional, untethered motion while the Stewart platform superimposes out-of-plane motion and accounts for any inaccuracies in the base.
When paired with one of the inertial measurement systems in the lab, the entire system can provide sub-millimeter accuracy throughout the workspace through the use of feedback control. The LASR Lab and HOMER offer several distinct advantages when compared to other proximity operations testing facilities:
- The setup allows for untethered circumnavigation of two or more vehicles.
- Planar motion is limited only by the size of the workspace.
- Low-cost alternative to larger installations while maintaining high fidelity.
- Supports testing of non-spacecraft multi-vehicle systems, such as autonomous aerial refueling.
- The entire facility is quasi-portable; in less than 24 hours, the system can be relocated as needed.
Feedback control of the planar base has been implemented and verified to show 2-3 mm accuracy depending on the aggressiveness of the desired trajectory. The full 6-DoF feedback controller has now also been validated and demonstrated.
The original prototype and first generation HOMER were designed and built in-house by former graduate researchers Jeremy Davis and James Doebbler. A second generation version is currently in the assembly stage while a high-speed version is in its final design stage.
STEP
The Suspended Target Emulation Pendulum, or STEP, is a motion simulator which allows for free “Space Like” motion in 5-DoF. The free response of the pendulum allows for the integration of contact dynamics into LASR’s proximity operations experiments. This capability will allow for experiments that involve vehicle-to-vehicle contact such as docking, capture, and repair.
LAT
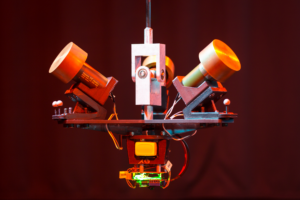 The LASR Attitude Test-bed, also called LAT, is a custom 3-DoF experimental attitude platform for testing attitude control and estimation algorithms. It is designed to be hung from the STEP and provide a simple system to evaluate the performance of theory and algorithms in a hardware enviornment.
The LASR Attitude Test-bed, also called LAT, is a custom 3-DoF experimental attitude platform for testing attitude control and estimation algorithms. It is designed to be hung from the STEP and provide a simple system to evaluate the performance of theory and algorithms in a hardware enviornment.