Rendezvous, Proximity Operations, and Docking
Space Rendezvous, Proximity Operations, and Docking (RPOD) is a set of maneuvers that involve the approach of a spacecraft to another spacecraft and the henceforth close distance operations, capture, or connection of the two objects. One space technology area that RPOD is used for is on-orbit satellite servicing. This has been extensively studied for refurbishing and refueling satellites, construction of large structures in space, and orbital debris management. Such studies have also been extended to examine the technical and economic feasibility of robotic servicing in geostationary orbit (GEO). Most of the initial missions to service and repair satellites leverage robotic manipulators to grasp the target spacecraft.
One prominent application of the technologies developed for satellite servicing is in the mitigation of orbital debris. The cost associated with maintaining and tracking a catalog of space objects, assessing collision risk, and planning & execution of collision avoidance maneuvers is a matter of concern in the space community. However, due to the uncontrolled tumbling motion of the resident space objects (RSOs), robotic manipulators are often not suitable or require meticulous control strategies for proximity operations.
In sight of this, the LASR Lab has made significant contributions in the areas of dynamics, control, and simulation of a Mobile Robotic System for 6-DOF Motion Emulation. The laboratory is home to a variety of robotic platforms that emulate satellite motions such as RPOD. One key robotic testbed is the Holonomic Omnidirectional Motion Emulation Robot (HOMER) that not only replaces air bearing tables for robotic proximity operation testing, but offers realistic 6-DOF motions to test sensors and actuators (for more information about our robot friends, click here).

Transforming Proximity Operations and Docking Service (TPODS)
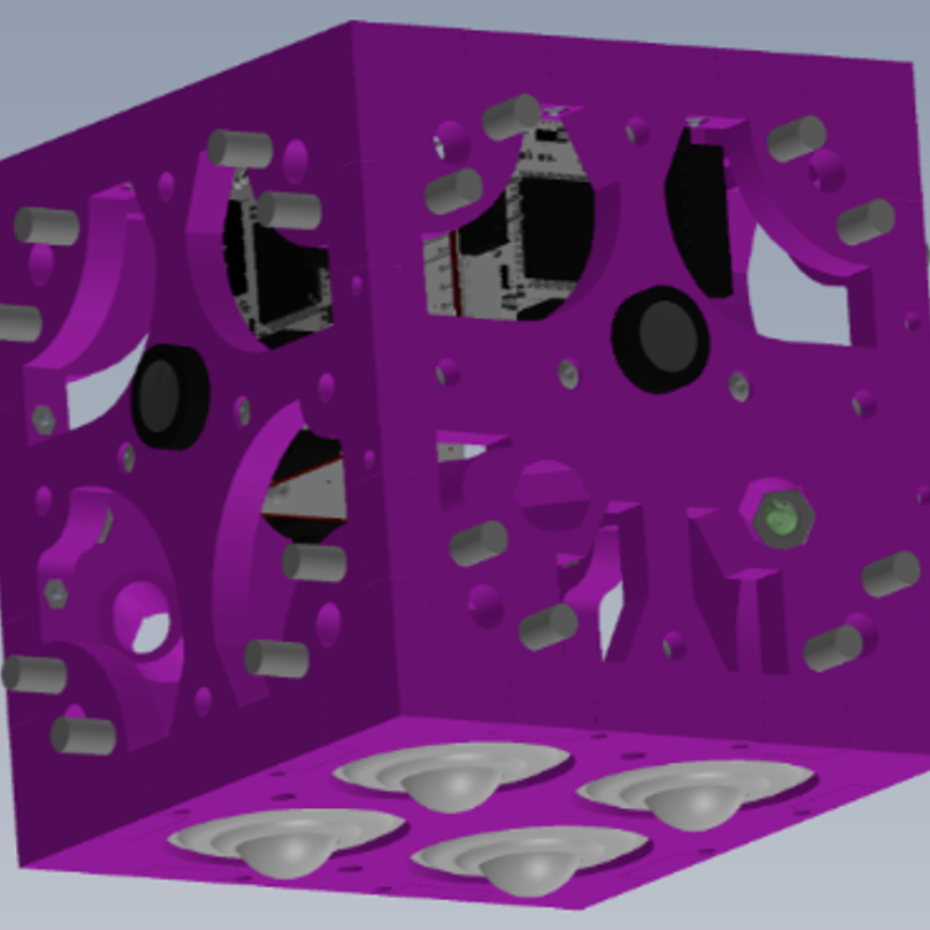
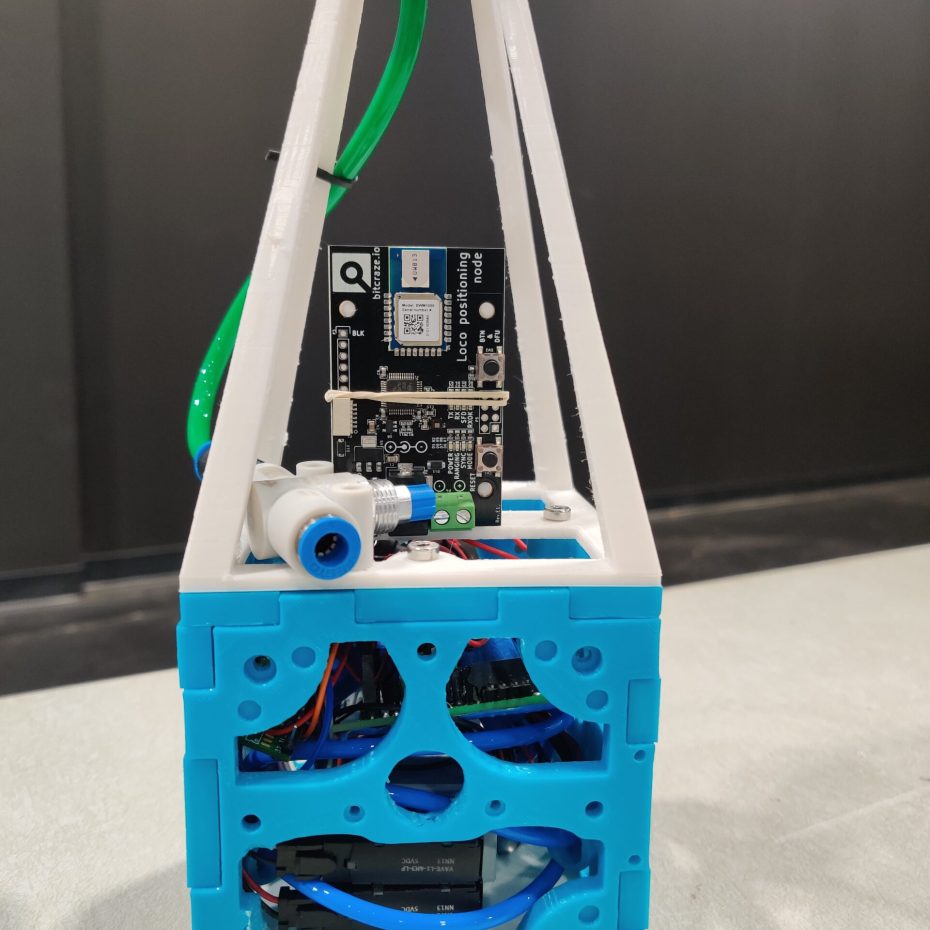
The LASR Lab is now investigating the use of free-flying spacecraft modules in several different on-orbit, servicing, and manufacturing (OSAM) activities as part of the Space University Research Initiative (SURI) funding opportunity awarded by the Air Force Office of Scientific Research to the ”Breaking the ’Launch Once, Use Once’ Paradigm” Team, which consists of Carnegie Mellon University (CMU), University of New Mexico (UNM), Texas A&M University (TAMU), and the Northrop Grumman Corporation (NGC). The work done by TAMU in the LASR Laboratory for this SURI project involves the system development and testing of the Transforming Proximity Operations and Docking Service (TPODS) satellite modules.

The TPODS are designed to gain custody of uncontrolled resident space objects (RSOs) via rendezvous and proximity operation (RPO). In addition to serving as a free-flying robotic manipulator to work with cooperative and uncooperative RSOs, the TPODS modules are engineered to have the ability to cooperate with one another to build scaffolding for more complex satellite servicing activities. The structural design of the prototype module is inspired by tensegrity principles, minimizing the structural mass of the module’s frame.